激光焊縫跟蹤的技術(shù)原理和系統(tǒng)組成
激光視覺傳感器通過激光條紋對焊縫進行掃描�,獲得焊縫截面積、焊縫間隙����、焊縫??左右邊緣高度。 它配備了適配的機器人接口���,將數(shù)據(jù)傳輸給機器人��。機器人可根據(jù)激光跟蹤視覺傳感器掃描的焊縫截面參數(shù)實時調(diào)整焊接擺動��、擺動頻率��、擺動左右停留時間����、焊接速度、焊接電流和電壓���,從而達到 實現(xiàn)高速����、高質(zhì)量的自適應(yīng)焊接����。
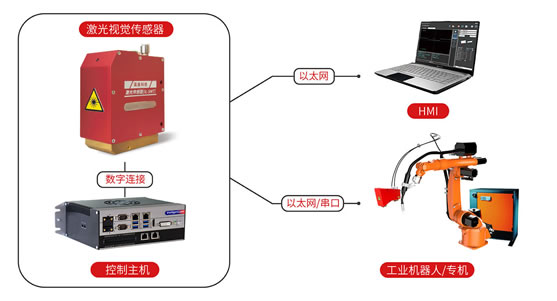
激光跟蹤機器人自適應(yīng)焊接系統(tǒng)主要由機器人、操作裝置�、檢測頭、檢測頭處理器�����、計算機5部分組成�。
激光焊縫跟蹤傳感器采用激光三角反射原理,即激光束被放大形成一條激光線�,投射到被測物體表面。 反射光通過高質(zhì)量的光學(xué)系統(tǒng)�,投射到成像矩陣上。 被測表面的距離(Z 軸)和沿激光線(X 軸)的位置信息���。 通過移動被測物體或輪廓儀的探頭�,可以獲得一組三維測量值�。 獲取的信息可用于焊縫搜索定位、焊縫跟蹤����、自適應(yīng)焊接參數(shù)控制、焊縫成形檢測以及將信息實時傳輸至機械手單元�����,完成各種復(fù)雜焊接��,避免焊接質(zhì)量偏差��,實現(xiàn) 智能焊接�。